
 Click it and Unblock the Notifications
Click it and Unblock the Notifications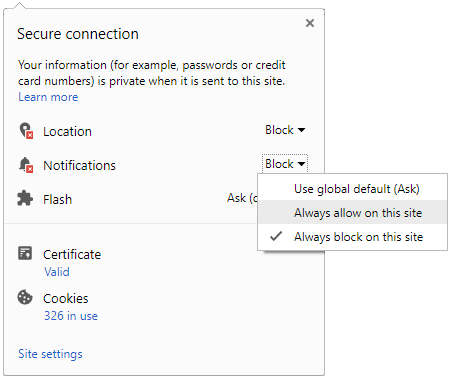
சீட்டா 3 ரோபோட்: பார்வையே இல்லாமல் தாவும் , ஓடும், குதிக்கும்!
இந்த கான்டேக்ட் டிடெக்சன் அல்காரிதம், எப்போது காற்றிலிருக்கும் காலை நிலத்தில் வைக்க வேண்டும் என்பதை கண்டறிய ரோபோட்டிற்கு உதவுகிறது.
எம்.ஐ.டியில் உள்ள பொறியாளர்களால் உருவாக்கப்பட்ட சீட்டா 3 ரோபோட்டால் குதிக்க முடியும், கடினமான தரைப்பரப்பை நான்குகால் பாய்ச்சலில் கடக்க முடியும், குப்பைகள் சூழ்ந்துள்ள படிக்கட்டுகளை ஏற முடியும், முன்பும் பின்னும் நிலை தடுமாறி செல்லும் போது விரைவாக நிலைநிறுக்ககொள்ளமுடியும். இத்தனைக்கும் அதற்கு முக்கியமாக பார்வை இல்லை.

'பார்வையில்லா சுயதிறன்' என்று அழைப்பதற்கு ஏதுவாக, 90பவுண்டு எடைகொண்ட இந்த இயந்திர மிருகம் வேண்டுமென்றே கேமாரக்கள் மற்றும் வெளிப்புற சுற்றுப்புற சென்சார்களை சார்ந்து இருக்காதவாறு வடிவமைக்கப்பட்டுள்ளது.

பேரிடர்
பேரிடர் பாதிக்கப்பட்ட பகுதிகள், மற்ற ஆபத்தான அல்லது அணுக முடியாத சூழ்நிலை உள்ள இடங்கள், பல்துறை செயல்பாடுகளான மின் நிலையத்தை ஆய்வு செய்தல் போன்றவற்றிற்கு கூட இந்த வடிவமைப்பை பயன்படுத்தலாம் என ஆராய்ச்சியாளர்கள் கூறுகின்றனர்.

சாங்பே கிம்
" பார்வையை அதிகமாக சார்ந்து இருக்காமல், பல்வேறு அசாதாரணமான நடவடிக்கைகள் இந்த ரோபோட் கையாள வேண்டும்" என்கிறார் இந்த ரோபோட்டின் வடிவமைப்பாளரும், எம்.ஐ.டி(பாஸ்டன்) இணை போராசிரியருமான சாங்பே கிம்.

துல்லியமான இடத்தில் இருக்கும்
" பார்வை இரைச்சல் மிக்கதாக, சற்று துல்லியமில்லாமல், சில நேரங்களில் பார்வையே இல்லாமலும் இருக்கலாம். எனவே பார்வையை பெரிதும் சார்ந்திருந்தால், உங்கள் ரோபோட் துல்லியமான இடத்தில் இருக்கும் அதேநேரம் மெதுவாக செயல்படும். எனவே எங்கள் ரோபோட் தொட்டு உணரக்கூடிய தரவுகளை அதிகம் சார்ந்திருக்க இருக்க வேண்டும்.அது போல, இந்த ரோபோட் வேகமாக நகரும் போது எதிர்பாராத எந்த தடையையும் கையாளும் திறனுடன் இருக்க வேண்டும் என்கிறார் கிம்.

ன்டேக்ட் டிடெக்சன் அல்காரிதம்
சீட்டா 3 ரோபோட் தனது சுற்றுபுறத்தில் இருந்து வழியே இரு அல்காரிதம்களை பயன்படுத்தி கணிக்கிறது. கான்டேக்ட் டிடெக்சன் அல்காரிதம் மற்றும் மாடல் பிரிடிக்டிவ் கண்ட்ரோல் அல்காரிதம்.

கால் அடி எடுத்து வைக்கும் போது
இந்த கான்டேக்ட் டிடெக்சன் அல்காரிதம், எப்போது காற்றிலிருக்கும் காலை நிலத்தில் வைக்க வேண்டும் என்பதை கண்டறிய ரோபோட்டிற்கு உதவுகிறது. மாடல் பிரிடிக்டிவ் கண்ட்ரோல் அல்காரிதம், கால் அடி எடுத்து வைக்கும் போது எவ்வளவு அழுத்தம் தர வேண்டும் என்பதை கணிக்கிறது.

50மில்லி செக்ண்ட்
இந்த அல்காரிதம்கள் ஒவ்வொரு காலுக்கும் 50மில்லி செக்ண்ட் அல்லது ஒரு நொடிக்கு 20 முறை என்ற வீதம் கணிக்கும் படி வடிவமைக்கப்பட்டுள்ளன. இந்த கண்டுபிடிப்பதானது மெட்ரைட்-ல் நடக்கும் சர்வதேச நுண்ணறிவு ரோபோட் கருத்தரங்களில் காட்சிப்படுத்தப்படவுள்ளது.

முன்னால் மற்றும் பின்னால் செல்லும் நகர்வுகளின் வரம்பு
இதன் முந்தைய படைப்பான சீட்டா 2உடன் ஒப்பிடும் போது, வன்பொருள் மட்டுமில்லாமல், முன்னால் மற்றும் பின்னால் செல்லும் நகர்வுகளின் வரம்பு, பக்கத்திற்கு பக்க சுழற்சி போன்றவை ஒரு பூனை வளைந்து தாவுவதை போல மேம்படுத்தப்பட்டுள்ளன என்கின்றனர் ஆய்வாளர்கள்.
-
 54,999
54,999 -
 36,599
36,599 -
 39,999
39,999 -
 38,990
38,990 -
 1,29,900
1,29,900 -
 79,990
79,990 -
 38,900
38,900 -
 18,999
18,999 -
 19,300
19,300 -
 69,999
69,999
-
 79,900
79,900 -
 1,09,999
1,09,999 -
 1,19,900
1,19,900 -
 21,999
21,999 -
1,29,900
-
 12,999
12,999 -
 44,999
44,999 -
 15,999
15,999 -
 7,332
7,332 -
 17,091
17,091
-
 29,999
29,999 -
 7,999
7,999 -
 8,999
8,999 -
 45,835
45,835 -
 77,935
77,935 -
 48,030
48,030 -
 29,616
29,616 -
 57,999
57,999 -
 12,670
12,670 -
 79,470
79,470